论文地址:Drop an Octave: Reducing Spatial Redundancy in Convolutional Neural Networks with Octave Convolution
1 Introduction
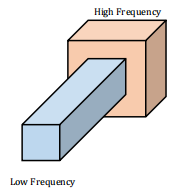
图片可以被分解为低空间频率和高空间频率的部分,它们分别描述缓慢变化的结构和剧烈变化的详细细节。作者认为卷积层输出的特征图可以被分解为不同的空间频率。借此,作者提出了能够存储高频和低频特征图的特征表示方法,并且提出了可以处理这种特征表示的卷积:Octave Convolution。通过这些处理,低频的特征图的空间分辨率可以安全地减少,因为低频中临近区域的信息是共享的。
OctConv优势:
- 由于减少了低频特征图的分辨率,减少了空间信息的冗余,不仅节约了内存,还节约了计算
- 在计算低频输出的时候(H->L),增加可感受野,提高了识别效果
2 Octave Feature Representation
传统方法中,所有输入输出的特征图都是相同的空间分辨率,这是非必要的,因为一些channels可能包含的是低频特征,它们是空间冗余的,是有压缩空间的。
为了解决这个问题,作者提出了Octave Feature Representation,把feature maps分解为两组,分别是低频和高频。把特征图\(X\)在通道维度进行分解\(X=\{X^{H},X^{L}\}\),\(X^H\in\mathbb{R}^{(1-\alpha)c\times h\times w}\)
3 Octave Convolution
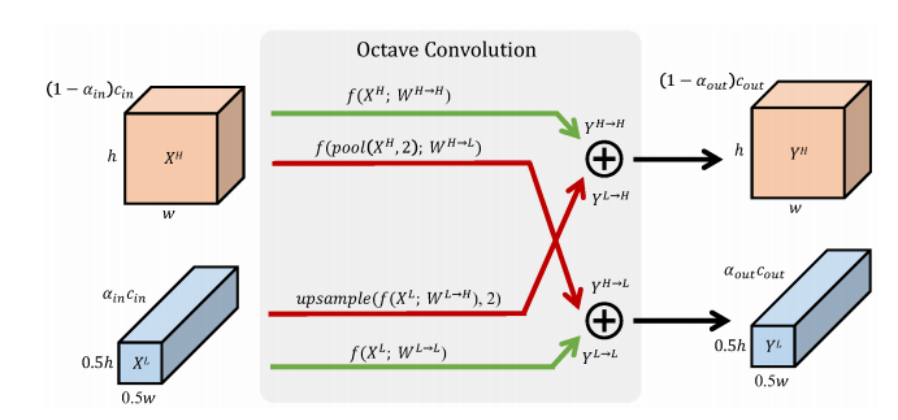
Octave Conv的设计目标就是在低频和高频分别处理特征图,节约计算,并且还能实现低频高频特征图之间的交流。
输出是\(Y=\{Y^{H},Y^{L}\}\),高频和低频都由两个流进行计算,\(Y^{H}=Y^{H\rightarrow H}+Y^{L\rightarrow H}\mathrm{and}Y^{L}=Y^{L\rightarrow L}+Y^{H\rightarrow L}\)。同样,对于卷积核也分为两组\(W=[W^{H},W^{L}]\),分别处理高频和低频特征图
对于高频特征图输出\(Y^H\),\((p,q)\)位置处由如下方式计算
\[\begin{aligned}
Y_{p,q}^{H}& =Y_{p,q}^{H\rightarrow H}+Y_{p,q}^{L\rightarrow H} \\
&= =\sum_{i,j\in\mathcal{N}_{k}}W_{i+\frac{k-1}2,j+\frac{k-1}2}^{H\to H}X_{p+i,q+j}^{H} \\
&+\sum_{i,j\in\mathcal{N}_k}W_{i+\frac{k-1}2,j+\frac{k-1}2}^{L\to H}X_{(\lfloor\frac p2\rfloor+i),(\lfloor\frac q2\rfloor+j)}^{L},
\end{aligned}\]
对于低频特征图输出\(Y^L\),\((p,q)\)位置处由如下方式计算
\[\begin{aligned}
\begin{gathered}Y_{p,q}\end{gathered}& \begin{aligned}=&Y_{p,q}^{L\to L}+Y_{p,q}^{H\to L}\end{aligned} \\
&=\sum_{i,j\in\mathcal{N}_k}W_{i+\frac{k-1}2,j+\frac{k-1}2}^{L\to L}X_{p+i,q+j}^{L} \\
&+\sum_{i,j\in\mathcal{N}_k}W_{i+\frac{k-1}2,j+\frac{k-1}2}^{H\to L}X_{(2*p+0.5+i),(2*q+0.5+j)}^{H},
\end{aligned}\]
代码如下:
class OctaveConv(nn.Module):
def __init__(self, in_nc, out_nc, kernel_size, alpha=0.5, stride=1, dilation=1, groups=1, \
bias=True, pad_type='zero', norm_type=None, act_type='prelu', mode='CNA'):
super(OctaveConv, self).__init__()
assert mode in ['CNA', 'NAC', 'CNAC'], 'Wong conv mode [{:s}]'.format(mode)
padding = get_valid_padding(kernel_size, dilation) if pad_type == 'zero' else 0
self.h2g_pool = nn.AvgPool2d(kernel_size=(2, 2), stride=2)
self.upsample = nn.Upsample(scale_factor=2, mode='nearest')
self.stride = stride
self.l2l = nn.Conv2d(int(alpha * in_nc), int(alpha * out_nc),
kernel_size, 1, padding, dilation, groups, bias)
self.l2h = nn.Conv2d(int(alpha * in_nc), out_nc - int(alpha * out_nc),
kernel_size, 1, padding, dilation, groups, bias)
self.h2l = nn.Conv2d(in_nc - int(alpha * in_nc), int(alpha * out_nc),
kernel_size, 1, padding, dilation, groups, bias)
self.h2h = nn.Conv2d(in_nc - int(alpha * in_nc), out_nc - int(alpha * out_nc),
kernel_size, 1, padding, dilation, groups, bias)
self.a = act(act_type) if act_type else None
self.n_h = norm(norm_type, int(out_nc*(1 - alpha))) if norm_type else None
self.n_l = norm(norm_type, int(out_nc*alpha)) if norm_type else None
def forward(self, x):
X_h, X_l = x
if self.stride ==2:
X_h, X_l = self.h2g_pool(X_h), self.h2g_pool(X_l)
X_h2h = self.h2h(X_h)
X_l2h = self.upsample(self.l2h(X_l))
X_l2l = self.l2l(X_l)
X_h2l = self.h2l(self.h2g_pool(X_h))
#print(X_l2h.shape,"~~~~",X_h2h.shape)
X_h = X_l2h + X_h2h
X_l = X_h2l + X_l2l
if self.n_h and self.n_l:
X_h = self.n_h(X_h)
X_l = self.n_l(X_l)
if self.a:
X_h = self.a(X_h)
X_l = self.a(X_l)
return X_h, X_l
4 Application
将OctConv融入骨干网络,在第一层卷积中,设置\(\alpha_{in}=0\mathrm{and}\alpha_{out}=\alpha.\),这样,得到的输出全是low frequency的了,为了把multi-frequency转换回去,设置\(\alpha_{out}=0\),这样会得到一个单一的全分辨率的输出。